
摘要:本文探讨了马斯克提出的纯视觉方案与激光雷达方案,分析了两者在算力要求上的差异,并探讨了未来融合的可能性。纯视觉方案依赖于强大的算法和计算能力,以识别和处理图像信息;而激光雷达方案则通过激光雷达技术提供精确的环境感知数据。随着技术的发展,两者融合将成为趋势,以满足更高的自动驾驶需求。
一、马斯克的纯视觉方案:算力要求高、技术门槛高
马斯克的纯视觉方案主要依赖于深度学习算法和强大的计算能力,随着深度学习技术的不断进步,视觉感知能力得到了显著提升,纯视觉方案对算力的要求极高,需要强大的计算资源和数据处理能力,这使得该方案的技术门槛相对较高,需要专业的团队和先进的设备支持。
在自动驾驶领域,纯视觉方案面临着复杂的环境感知任务,马斯克的纯视觉方案通过算法优化、模型训练等方式,以实现更精准的感知效果,但与此同时,它也需要不断的技术创新和研究投入来满足日益增长的需求。
激光雷达方案:成本暂高但技术门槛相对较低
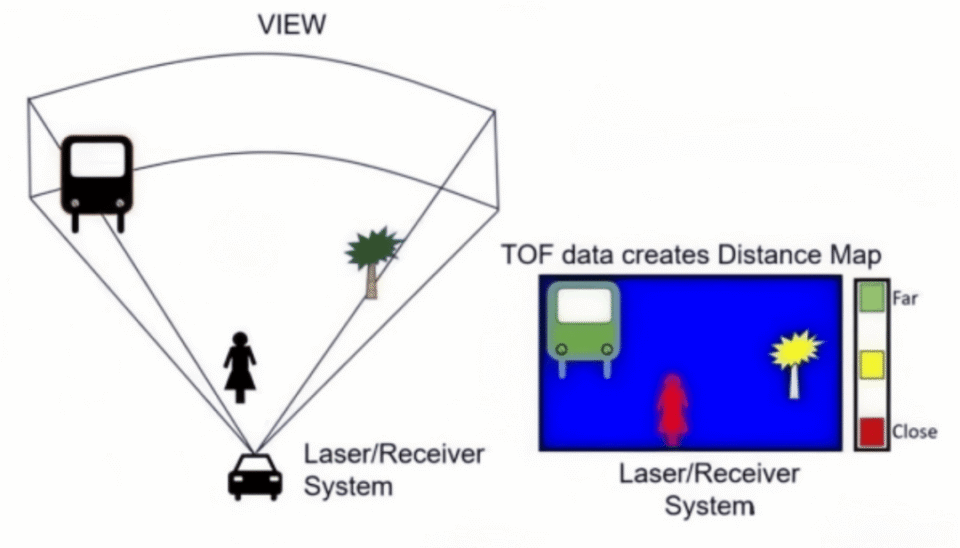
与纯视觉方案不同,激光雷达方案主要利用激光雷达(LiDAR)进行环境感知,虽然激光雷达方案在成本上暂时高于纯视觉方案,但其技术门槛相对较低,更容易实现和推广。
激光雷达通过发射激光束并接收反射光来感知周围环境,具有较高的精度和可靠性,激光雷达方案也面临着一些挑战,如天气条件和光照变化等因素可能会影响其性能。
纯视觉方案与激光雷达方案的比较
纯视觉方案和激光雷达方案各有优劣,纯视觉方案具有高度的灵活性和适应性,可以适应各种环境条件下的自动驾驶任务,其对算力的高要求增加了技术实现的难度和成本,激光雷达方案虽然成本稍高,但技术门槛较低,更容易实现和推广,激光雷达在恶劣天气条件下的性能相对稳定,具有一定的优势。
未来终极:纯视觉与激光雷达的完美结合
面对纯视觉方案和激光雷达方案的挑战与机遇,未来的自动驾驶技术可能会走向二者的结合,纯视觉方案可以通过引入激光雷达数据来提高环境感知的准确性和鲁棒性,而激光雷达方案可以借助深度学习技术优化数据处理和分析过程,降低成本并提高性能,这种融合趋势将使自动驾驶系统具备更高的感知能力、更强的适应性和更低的成本,为自动驾驶技术的普及和应用提供有力支持。
展望
随着技术的不断进步和成本的不断降低,纯视觉与激光雷达的合一将成为可能,我们期待看到更多的创新技术和研究成果在这一领域涌现,推动自动驾驶技术的普及和应用,政府、企业和研究机构应加强合作,共同推动自动驾驶技术的发展,为智能交通、智慧城市等领域的发展做出更大贡献,我们还需要关注其他新兴技术如5G通信、人工智能等的发展对自动驾驶领域的影响,以推动整个行业的持续创新和发展。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号